Plataforma de operación aérea con brazo de manivela eléctrica GTBZ14JD





I. Descripción general y características del producto
Las plataformas elevadoras de manivela eléctrica son desarrolladas por XCMG, estructuras compactas y carrocería de 1,75 m de ancho.El sistema de control inteligente y perfecto presenta el diseño humanizado, el diseño libre de mantenimiento y fácil uso y mantenimiento, brindando múltiples opciones y seguridad integral.
[Ventajas y características]
●La cosechadora de pluma en forma de Σ y el diseño de deriva cero la hacen más productiva.
●Un radio de giro tan pequeño como 3,15 m permite que la máquina funcione en espacios estrechos.
●La batería de gran capacidad de 48 V y 420 Ah hace que la capacidad de crucero sea más prolongada.
●Tecnologías avanzadas de funcionamiento de motores de CA;tecnologías de control del diferencial de dirección;acciones poderosas y constantes;pendiente hasta un 30%
●Las tecnologías de bomba de CC y control proporcional ahorran energía y son efectivas, lo que hace que el trabajo sea más estable y seguro.
●Respetuoso con el medio ambiente, cero emisiones, bajo nivel de ruido, viaje sin huellas, adecuado para la construcción en interiores.
II.Introducción de las partes principales
1. Parte del chasis
Configuraciones principales;2WD, dirección en dos ruedas, llantas sólidas.
(1) Velocidad máxima de conducción a 5,2 km/h.
(2) Pendiente máxima al 30%.
(3) Se aplica el reductor de desplazamiento incorporado que integra el motor y el reductor y se proporcionan dos velocidades de conducción (alta y baja velocidad) para satisfacer las demandas de conducción de la máquina en diferentes entornos.El mecanismo de desplazamiento presenta una función de autofrenado durante el desplazamiento en pendientes y está equipado con un dispositivo de embrague para facilitar el remolque en caso de mal funcionamiento.
(4) Mecanismo de manivela-deslizador para girar para lograr un radio de giro más pequeño;
2. Parte de la pluma
(1) Brazo plegable + brazo telescópico + manivela
(2) Material de la pluma: la pluma está soldada con acero de alta resistencia para lograr un peso ligero y una alta seguridad.
(3) El brazo plegable consta de dos juegos de estructuras de paralelogramo, con articulación en el medio, y podría moverse al mismo tiempo con la ayuda de un cilindro basculante, lo que hace que el trabajo sea más efectivo.
(4) Dos secciones de brazos telescópicos que sean del tipo telescópico de un solo cilindro;bielas de paralelogramo
3. Parte del tocadiscos
(1) giro discontinuo de 355° y dos orificios de montaje para transferir pasadores de bloqueo;
(2) La plataforma giratoria se compone de una sola placa con nervadura de refuerzo;los puntos de las bisagras están muy colocados y el contrapeso se coloca en la parte trasera de la plataforma giratoria;
4. Parte de la plataforma
(1) plataforma de trabajo grande de 1,4 m × 0,7 m.
(2) Plataforma giratoria de 160°.
(3) Hasta 227 kg de capacidad de carga.
(4) Sistema de nivelación automática proporcional electrohidráulica.
5. Sistema hidráulico
(1) Partes hidráulicas: las partes principales, incluida la bomba hidráulica y la válvula maestra, adoptan productos de marcas de renombre internacional.
(2) El sistema hidráulico funciona con una bomba de batería;La bomba de engranajes se acciona directamente con el motor.
(3) El sistema hidráulico de la superestructura es un sistema de bomba de engranajes de flujo constante: basado en las tecnologías de control proporcional eléctrico-hidráulico, la máquina puede realizar el giro de la superestructura, el abatimiento de la pluma, la retracción/extensión de la pluma, el balanceo del trabajo. plataforma;la válvula principal de la superestructura es de válvula proporcional electrohidráulica.
(4) Unidad de energía de emergencia instalada: puede garantizar que la pluma se pueda retraer al estado de conducción en caso de mal funcionamiento del motor o la bomba de aceite.
6. Sistema eléctrico
(1) Tecnología de control PLC: se proporciona un controlador para cada plato giratorio y plataforma.Se instala una caja de control para la plataforma giratoria del chasis y la plataforma respectivamente para controlar el chasis, la plataforma giratoria, la pluma y la plataforma.
(2) Elementos de control principal: dirección del chasis y control de desplazamiento;el giro de la plataforma giratoria;brazo telescópico;control de abatimiento;el giro de la plataforma
(3) Múltiples métodos de protección de seguridad: monitoreo del accionamiento del motor;protección de sobrecarga del motor;advertencia de inclinación del vehículo;advertencia de sobrecarga;carrera de alta velocidad limitada;caída de emergencia;
terceroConfiguración de las partes principales de GTBZ14JD
| S/N | Nombre | Cantidad | Nota |
| Batería | 8 | troyano | |
| Cargador | 1 | Dongguan Longsheng | |
| accionamiento por motor | 2 | CURTIS | |
| reductor viajero | 2 | Omni | |
| Motor de CA en funcionamiento | 2 | KDS | |
| Bomba de batería principal | 1 | BUCHER | |
| Bomba de batería auxiliar | 1 | BUCHER | |
| bomba principal | 1 | Sant | |
| Cilindro de giro | 1 | EE. UU. HELAC | |
| Cilindro nivelador | 2 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| Cilindro de basculación del brazo n.º 1 | 2 | ||
| Cilindro de basculamiento del brazo n.º 2 | 1 | ||
| Cilindro del brazo del cigüeñal | 1 | ||
| Cilindro telescópico | 1 | ||
| Cilindro de dirección | 1 | ||
| Válvula de equilibrio | 5 | Sant/EATON | |
| Controlador | 2 | Hirschmann | |
| Sensor de inclinación de doble eje | 1 | parker | |
| Mostrar | 1 | Xuzhou Hirschmann Electronic Co., Ltd. | |
| Palanca de mando | 2 | Danfoss | |
| Interruptor de pie | 1 | SOLES | |
| Girar y conducir | 1 | Huafang | |
| motor de giro | 1 | Blanco | |
| Llantas | 4 | Laizhou Yishimai |
IV.Tabla de parámetros técnicos principales de GTBZ14JD
| Artículo | Parámetro |
| Parámetros del estado de funcionamiento | |
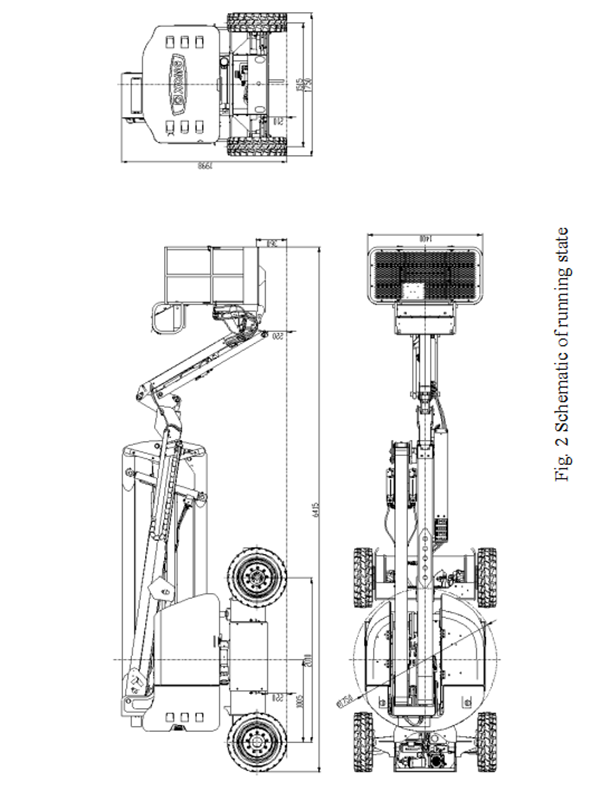
| Dimensiones generales (L × W × H) | 6,42 × 1,75 × 2 metros |
| Dimensiones totales de la plataforma de trabajo | 1,4 × 0,7 × 1,15 m |
| Velocidad máxima | 5,2 km/h |
| Máxima capacidad de ascenso | ≥30 % |
| mín.radio de giro exterior | ≤3,15m |
| Distancia al suelo/m (centro) | 0,21 metros |
| distancia entre ejes | 2 metros |
| Masa total | 6500kg |
| Parámetros de rendimiento de la operación principal | |
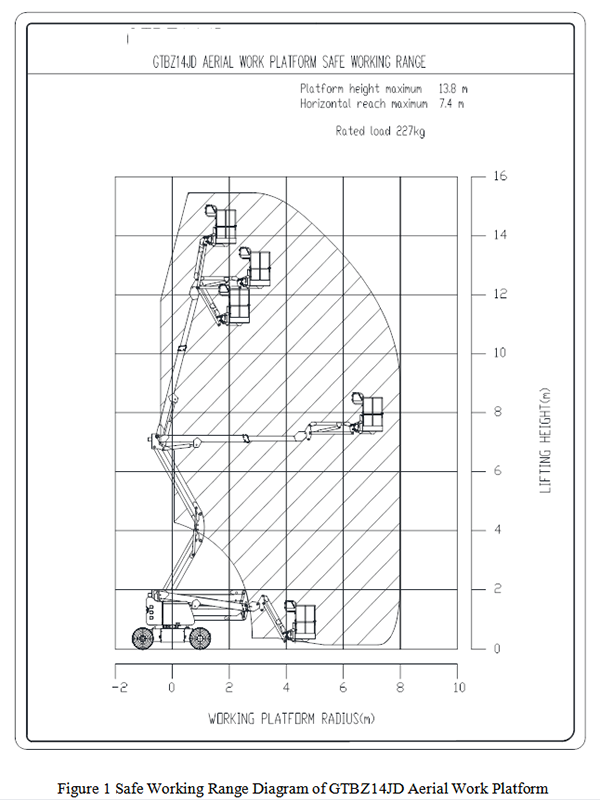
| Altura nominal de trabajo | 15,5 metros |
| Altura máxima de la plataforma | 13,8 metros |
| máx.rango de trabajo | 8 metros |
| Altura máxima de extensión neta | 7,03 metros |
| Alcance del abatimiento del brazo n.º 1 | 0°~60° |
| Alcance del abatimiento del brazo n.º 2 | -8°~75° |
| Alcance de la elevación del brazo de manivela | -60°~80° |
| Alcance del columpio de la plataforma | 180° |
| Ángulo de giro | 355° |
| Radio de giro de la plataforma giratoria | 0,875m |
| Carga máxima | 227 kg |
| Giro hacia atrás máximo | 0 metros |
| Sistema de control | Control proporcional de 12 V CC |
| Neumático | Neumático sólido 250-15, opcional 240/55 D17.5 |
| Parámetros de potencia | |
| Fuente de alimentación | 420 Ah/48 V CC |
| Unidad de poder | 4 kw/48 V CC |
| Unidad de potencia auxiliar | 2,2 kw/24 V CC |
| motor en marcha | 3,3 kw/32 V CA |
V. Diagrama de rango de trabajo seguro de la máquina
Adjunto: configuraciones opcionales
6.1 Neumático macizo respetuoso con el medio ambiente (sin rastro)
6.2 Alimentación de la plataforma
El generador hidráulico o la fuente de alimentación externa está conectado a esta plataforma para su uso.
Especificación del cable de alimentación: 4 × 4 mm2
Corriente nominal: 35A
6.3 Tubo de aire de la plataforma
El suministro de aire externo se canaliza a esta plataforma para su uso.
Diámetro de la tubería de aire: 8 mm
6.4 Soporte anti-impacto de la plataforma
El dispositivo anti-impacto plegable debe proteger al operador de ser impactado con el elemento anterior durante el ascenso de la plataforma, y también podría ser plegable, sin ocupar el espacio de trabajo.